
Drive Right: XR Autonomous Driving Simulator
Drive Right is an effort to explore human-machine interactions for the next generation of autonomous vehicles and help improve general road safety. This project is supervised by Dr. Rahul Mangharam from the ESE (Electrical and Systems Engineering) Department at the University of Pennsylvania and is affiliated with the autonomous driving start-up...

Quadruped Robot Locomotion using Deep Reinforcement Learning
This project is the final project of ESE 650 Learning in Robotics at the University of Pennsylvania.
In this project, I used Deep Reinforcement Learning (DRL) to train an agent to control the locomotion of a quadruped robot. The DRL algorithm used in this project is Proximal Policy Optimization (PPO). The simulation environment was developed us...

VIO-based Quadrotor
This project contains seven assignments and a cumulative final assignment in MEAM620 Advanced Robotics at the University of Pennsylvania.
In this course, I implemented a geometric nonlinear controller, two trajectory generators that are based on Dijkstra and A*, a complementary filter for attitude estimation based on data from a six-axis IMU, a...

Kinematics, Path Planning, and PANDA Robotic Arm Manipulation
This project contains 4 lab assignments and a cumulative final assignment in MEAM520 Introduction to Robotics at the University of Pennsylvania. In this course, I implemented an FK (Forward Kinematics) algorithm using DH (Denavit–Hartenberg) parameters, a 2D IK (Inverse Kinematics) algorithm using geometry, an Inverse Velocity Kinematics solver ...
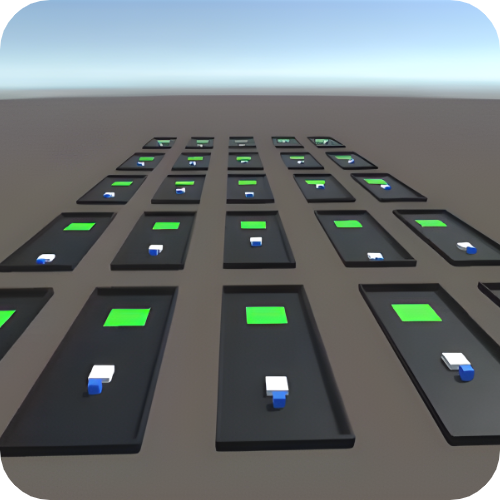
Interaction Simulation using Reinforcement Learning
This project aims at simulating interaction in a virtual environment using Reinforcement Learning and Unity ML-Agents. It was supervised by Dr. Suvranu De, the head of the Department of MANE (Mechanical, Aerospace, and Nuclear Engineering) at Rensselaer Polytechnic Institute and the director of CeMSIM (Center for Modeling, Simulation, and Imagin...

VORTeX (Virtual Operating Room Team Experience)
The objective of the VORTeX (Virtual Operating Room Team Experience) project is to train clinicians collaboratively in a distributed fashion using HMD devices to further develop their non-technical skills based on computer-generated simulation scenarios. This project is supervised by Dr. Suvranu De, the Head of the Department of MANE (Mechanical...
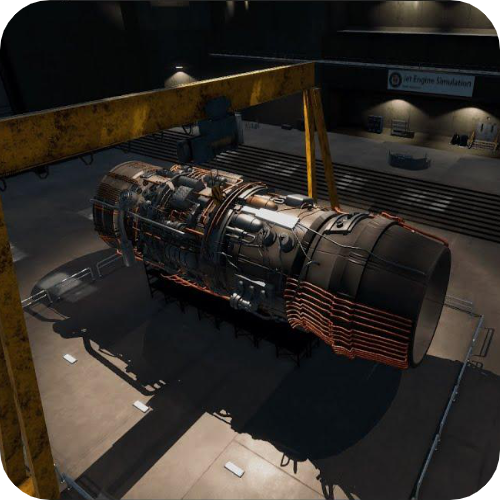
Virtual Reality Turbojet Engine
In this project, I developed a VR turbojet engine simulation from scratch to improving the efficacy of propulsion and engine cycle teaching. This project was supervised by Dr. James Young, a professor in the Department of MANE (Mechanical, Aerospace, and Nuclear Engineering) at Rensselaer Polytechnic Institute. During the development, I construc...

VCP (Virtual Chemical Plant)
In this project, I developed two VR simulations with Dr. Ronald Hedden, a professor in the Department of Chemical Engineering at Rensselaer Polytechnic Institute, for education in process control and thermodynamics using Unity, C#, Blender, and MATLAB. I applied my knowledge of game development, 3D modeling, heat transfer, fluid flow, thermodyna...
17 post articles, 3 pages.