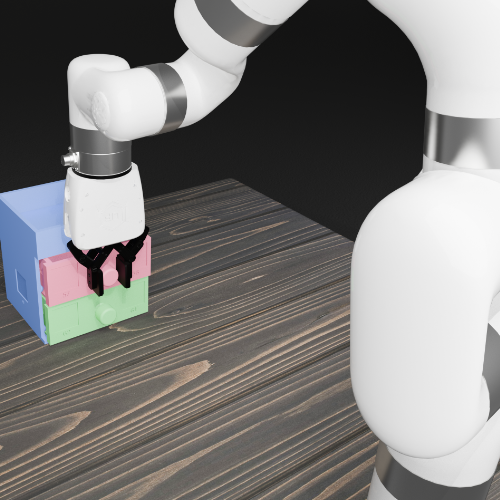
Dynamic Rank Adjustment in Diffusion Policies for Efficient and Flexible Training
Diffusion policies trained via offline behavioral cloning have recently gained traction in robotic motion generation. While effective, these policies typically require a large number of trainable parameters. This model size affords powerful representations but also incurs high computational cost during training. Ideally, it would be beneficial t...
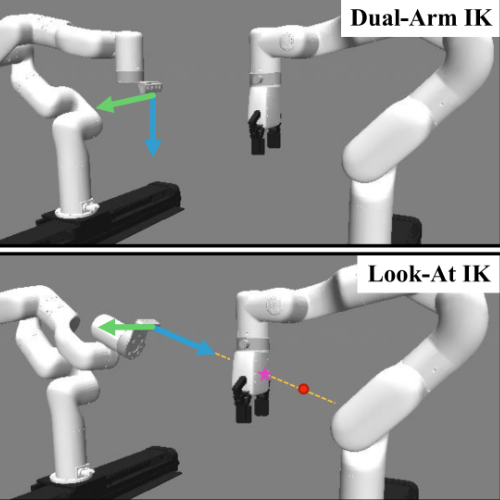
A Comparative Study on State-Action Spaces for Learning Viewpoint Selection and Manipulation with Diffusion Policy
Robotic manipulation tasks often rely on static cameras for perception, which can limit flexibility, particularly in scenarios like robotic surgery and cluttered environments where mounting static cameras is impractical. Ideally, robots could jointly learn a policy for dynamic viewpoint and manipulation. However, it remains unclear which state-a...
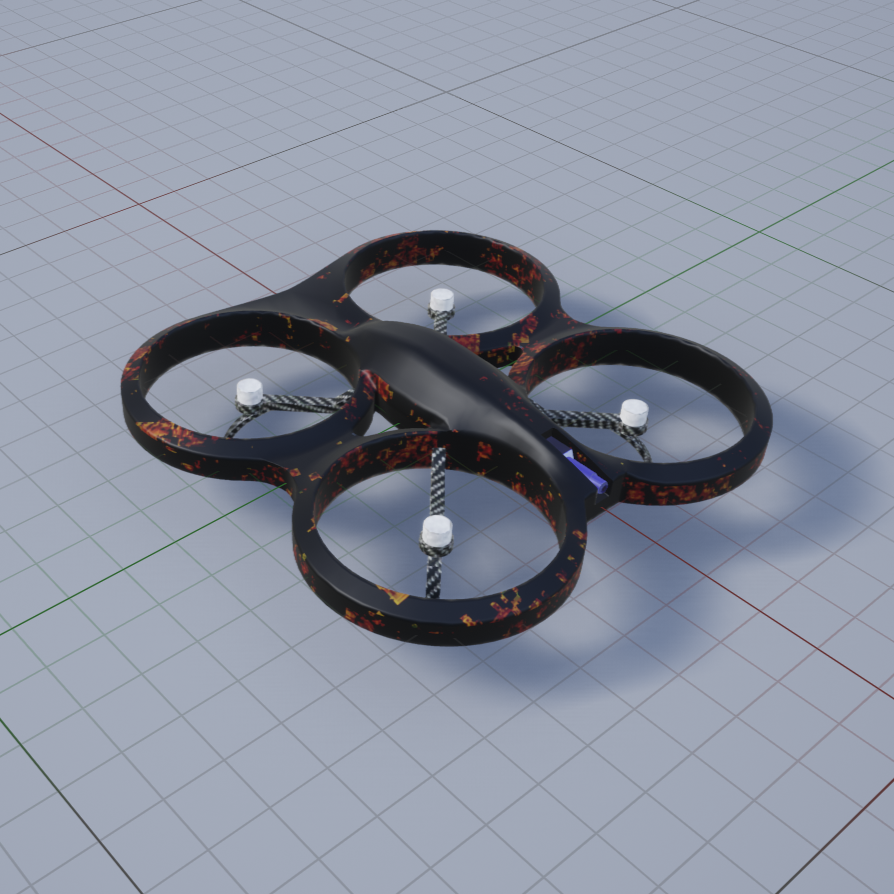
Deep Learning for Optimization of Trajectories for Quadrotors
This work presents a novel learning-based trajectory planning framework for quadrotors that combines model-based optimization techniques with deep learning. Specifically, we formulate the trajectory optimization problem as a quadratic programming (QP) problem with dynamic and collision-free constraints using piecewise trajectory segments through...
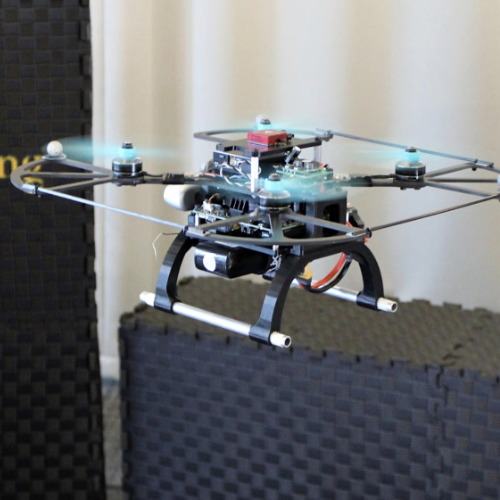
Master's Thesis: Imitation Learning for Autonomous Quadrotor Flight
This is my Master’s thesis, completed in 2023 for the MSE in Robotics at the University of Pennsylvania, advised by Prof. Vijay Kumar with M. Ani Hsieh on the committee. The full document is available here: Imitation Learning for Autonomous Quadrotor Flight (PDF).

MEGA-DAgger: Imitation Learning with Multiple Imperfect Experts
Imitation learning has been widely applied to various autonomous systems thanks to recent development in interactive algorithms that address covariate shift and compounding errors induced by traditional approaches like behavior cloning. However, existing interactive imitation learning methods assume access to one perfect expert. Whereas in reali...

Imitation Learning for Autonomous Racing
Autonomous racing with scaled race cars has gained increasing attention as an effective approach for developing perception, planning and control algorithms for safe autonomous driving at the limits of the vehicle’s handling. To train agile control policies for autonomous racing, learning-based approaches largely utilize reinforcement learning, a...

Landmark Complex Exploration via Deep Reinforcement Learning
In recent years Landmark Complexes have been successfully employed for localization-free and metric-free autonomous exploration using a group of sensing-limited and communication-limited robots in a GPS-denied environment. To ensure rapid and complete exploration, existing works make assumptions on the density and distribution of landmarks in th...

F1TENTH 3D Simulator
This project is still under heavy development. This project aims to develop a 3D simulator for learning-based methods, including reinforcement learning and imitation learning, on the F1TENTH platform. The current F1TENTH gym is a 2D environment similar to the OpenAI CarRacing Gym. The physics simulation and perception are limited in the current ...
18 post articles, 3 pages.